Hace unos años, Boston Dynamics estableció el estándar para el campo al hacer que personas con palos de hockey intentara evitar que Spot, el robot cuadrúpedo, abriera una puerta.
Anteriormente, en 2015, la lejana agencia de investigación federal Darpa organizó un desafío en el que obligó a torpes robots humanoides a avergonzarse en una carrera de obstáculos fuera de la liga de las máquinas.
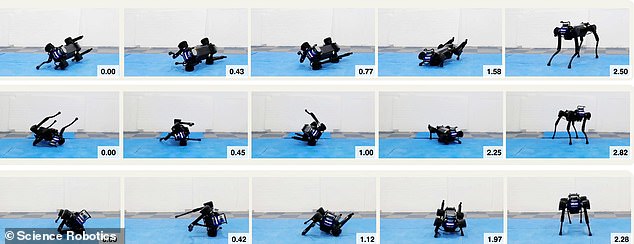
Los creadores del perro robot Jueying le han enseñado una forma fascinante de defenderse de un humano que lo patea o lo empuja con un palo.
Un equipo de investigadores de la Universidad de Zhejiang de China, donde también se desarrolló el hardware de Jueying, y la Universidad de Edimburgo no les enseñó a los Jueying cómo recuperarse después de un asalto, sino que dejaron que el robot lo resolviera.
Es así como un desarrollador de hardware como Boston Dynamics trata de enseñarle a un robot cómo moverse, usando décadas de experiencia humana para codificar, línea por línea, la forma en que se supone que un robot reacciona a estímulos como el de una persona.
El roboticista de la Universidad de Edimburgo Zhibin Li y sus colegas empezaron por entrenar el software que guiaría una versión virtual del perro robot. Desarrollaron una arquitectura de aprendizaje con ocho “expertos” algorítmicos que ayudarían al perro a producir comportamientos complejos. Para cada uno de estos, se utilizó una red neuronal profunda para entrenar el modelo de computadora del robot para lograr una habilidad particular, como trotar o enderezarse si se caía de espaldas. Si el robot virtual intentaba algo que lo acercaba más a la meta, obtenía una recompensa digital. Si hizo algo que no era ideal, obtuvo un demérito digital.
Esto se conoce como aprendizaje por refuerzo. Después de muchos intentos guiados de prueba y error, el robot simulado se convertiría en un experto en una habilidad.
En un entorno simulado se pueden crear todos los escenarios posibles o diferentes configuraciones.
Los investigadores combinaron el cerebro de ocho expertos en una red general para actuar como una especie de entrenador o capitán de equipo. Esto permite que el cerebro artificial de Jueying aproveche el conocimiento de cada experto: cómo correr, girar o enderezarse.
Los investigadores del equipo de Jueying podrían luego trasladar lo que el robot digital aprendió en la simulación a un robot real en el mundo real.